











- Lógica de Control
- Montaje Experimental
- Multimedia de los experimentos en Entorno Real
Lógica de Control
Se usará el control aeronáutico explicado en Park S., Deyst J., and How J. P. (2006) para el seguimiento de camino por parte de un barco. La línea de horizonte (LOS) usada por el control para calcular el error entre el camino seguido por el barco y la trayectoria deseada será de 1000m. En la figura se muestran las variables usadas para calcular el error entre los caminos deseado y real, y de este modo controlar la distancia ‘d’ entre ambos a través del control del timón.
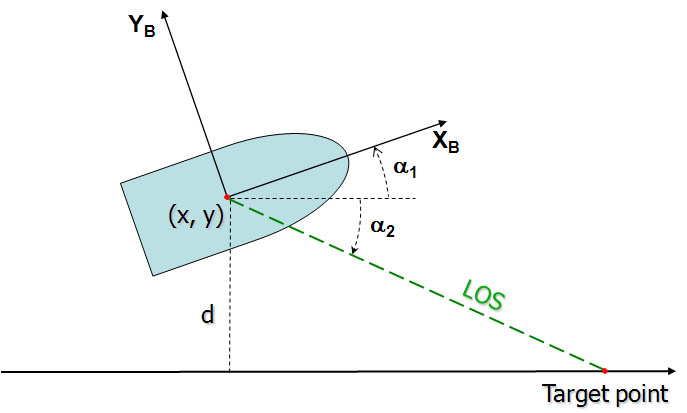
El algoritmo comienza buscando el punto en el camino deseado que se encuentra a la distancia de LOS. Tras esto, son calculados los ángulos, el primero como el arcotangente de las coordenadas de velocidad del barco, y el segundo de nuevo como un arcotangente, pero en este caso del vector que une el centro de masas del barco con el punto en el camino de referencia a la distancia de LOS.
![]()
La suma de estos dos ángulos es usada para calcular la variación del timón, que alimentará el control del vehículo.
Donde ‘w’ es la variación de orientación del barco respecto al tiempo (velocidad angular), ‘U’ es la velocidad de avance y ‘L’ es la distancia de LOS. La velocidad angular de guinada es integrada para obtener el ángulo de orientación como entrada del control de rumbo para obtener el ángulo de timón del barco.
Montaje Experimental
El USV utilizado para las pruebas de experimentación es un modelo a escala de un buque de carga de 1 metro y medio de largo. Este USV esta sobreactuado, sin embargo, la hélice de proa no se utiliza y las dos boquillas de popa se ponen juntas, de modo que el buque esta experimentalmente subactuado y es impulsado por dos motores eléctricos conectados a las hélices de la popa de un engranaje de reducción. El timón es controlado por dos boquillas manejadas por dos servos.
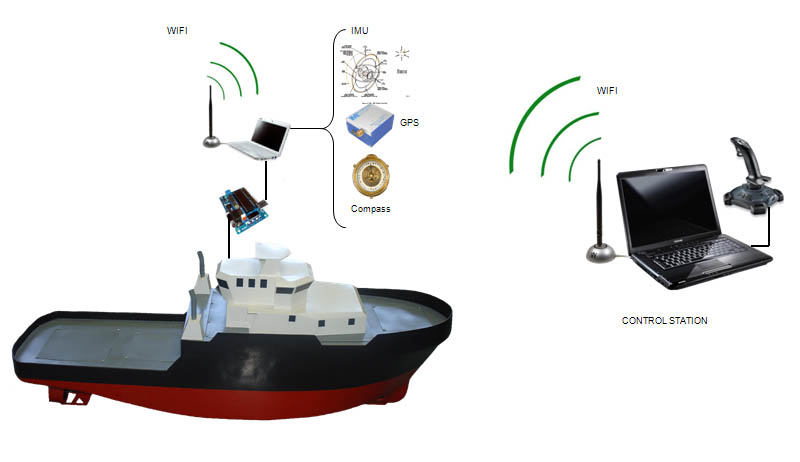
Todos estos sistemas están relacionados con el I/O target HARDWARE USB/RS232 (28 servos) que une los motores y servos con el ordenador a bordo NETBOOK ACER ASPIRE UNO 150-AW, donde se encuentra el software de control. Además de ello, hay un sistema GPS a bordo conectado a la computadora, así como una IMU y una brújula para las distintas mediciones.
El ordenador está conectado a bordo de la estación de control a través de una conexión WiFi. La estación de control envía las senales de control a la VSU para que pueda seguir el camino deseado.